二分图概念
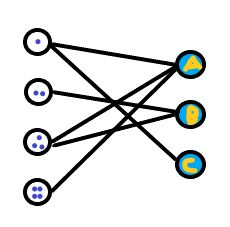
二分图(二部图),图论一种特殊的模型。设G=(V,E)是一个无向图,如果顶点V可分割为两个互不相交的子集(A,B),并且图中的每条边( i,j )所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为一个二分图。
简而言之,一个图所有的顶点被分成两部分,同一部分的顶点之间没有边。如图所示:
二分图匹配
给定一个二分图G,在G的一个子图M中,M的边集{E}中的任意两条边都不依附于同一个顶点,则称M是一个匹配。
极大匹配(Maximal Matching)是指在当前已完成的匹配下,无法再通过增加未完成匹配的边的方式来增加匹配的边数。最大匹配(maximum matching)是所有极大匹配当中边数最大的一个匹配。选择这样的边数最大的子集称为图的最大匹配问题。
如果一个匹配中,图中的每个顶点都和图中某条边相关联,则称此匹配为完全匹配,也称作完备匹配。
增广路经
增广路径的定义:设M为二分图G已匹配边的集合,若P是图G中一条连通两个未匹配顶点的路径(P的起点在X部,终点在Y部,反之亦可),并且属M的边和不属M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M的一条增广路径。
增广路径是一条“交错轨”。也就是说, 它的第一条边是目前还没有参与匹配的,第二条边参与了匹配,第三条边没有..最后一条边没有参与匹配,并且起点和终点还没有被选择过,这样交错进行,显然P有奇数条边
由增广路的定义可以推出下述三个结论:
- P的路径长度必定为奇数,第一条边和最后一条边都不属于M,因为两个端点分属两个集合,且未匹配。
- P经过取反操作可以得到一个更大的匹配M’。
- M为G的最大匹配当且仅当不存在相对于M的增广路径。
匈牙利算法
匈牙利算法是基于Hall定理中充分性证明的思想,它是部图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
匈牙利算法基本模式:
初始时最大匹配为空
while 找到增广路经
do 把增广路径加入到最大匹配中去
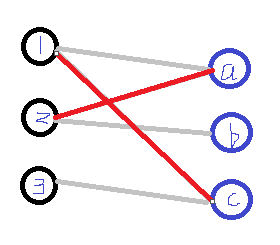
具体过程如图所示:
1.如图所示,1可以与a,c匹配,2可以与a,b匹配,3可以与c匹配
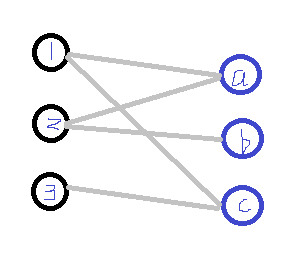
2.首先将对1进行搜索,1可以与a匹配,则将1与a相连
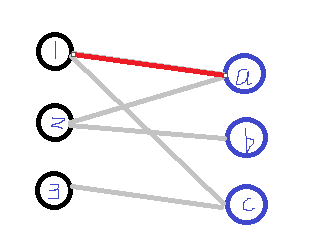
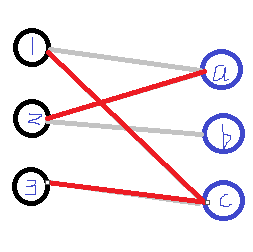
3.再对2进行搜索,2可以与a匹配
4.但是a已经与1匹配了,那么顺着a->1这条路找到1,再对1进行搜索,发现1还可以与c进行匹配,并且当前c还未与任何X区顶点匹配,则将1与c相连
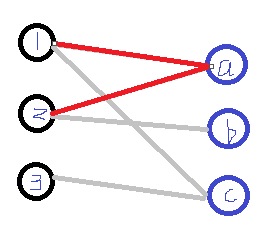
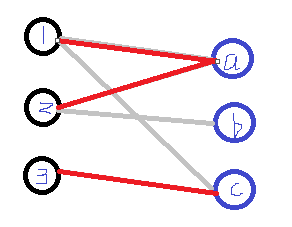
5.现在对3进行匹配,发现3可以与c匹配
6.这时发现c已经匹配了,则顺着c->1这条路找到1,再对1进行搜索,发现1还可以与a匹配
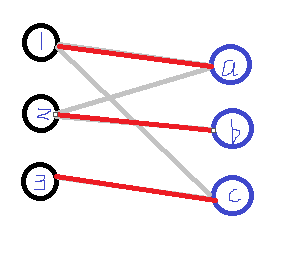
7.但a也已经匹配了,则顺着a->2这条路找到2,这时发现2还可以与b匹配,并且b当前还未与任何X顶点匹配,则将2与b匹配,之后得到的结果即为最大匹配
以下是实现代码
1 | bool find(int x) { //寻找增广路 |
主程序调用:
1 | for(int i = 1; i <= N; i++){ //对每一个X部分顶点进行遍历 |
例题:POJ3041
给一个N*N的矩阵,有些格子有障碍,要求我们消除这些障碍,问每次消除一行或一列的障碍,
最少要几次。这里将每行x看成一个X结点,每列Y看成一个Y结点,障碍的坐标x,y看成X到Y的
一条边,构建出图后,就变成了找最少的点,使得这些点与所有的边相邻,即最小点覆盖问题。
又继续敲了一遍匈牙利算法
1 | #include<cstdio> |

